PinnedAhmed TahaL2-CAF: A Neural Network DebuggerEvery software engineer has used a debugger to debug his code. Yet, a neural network debugger… That’s news! This paper [1] proposes a…May 24, 2021May 24, 2021
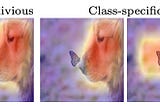
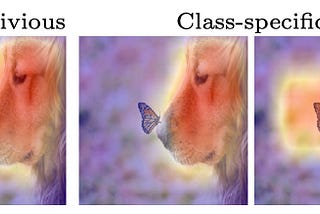
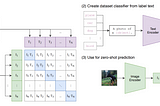
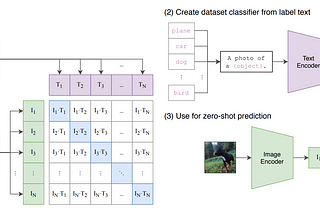
Ahmed TahaSigmoid Loss for Language Image Pre-TrainingContrastive Language Image Pre-training (CLIP) has gained significant momentum after OpenAI’s CLIP paper [2]. CLIP uses image-text pairs to…Mar 183Mar 183
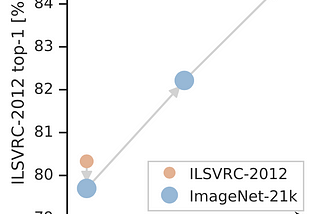
Ahmed TahaBig Transfer (BiT): General Visual Representation LearningPre-trained representations bring two benefits during fine-tuning: (1) improved sample efficiency, and (2) simplified hyperparameter…Jul 3, 2023Jul 3, 2023
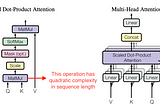
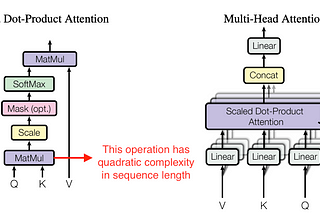
Ahmed TahaFlashAttention: Fast and Memory-Efficient Exact Attention with IO-AwarenessStandard attention suffers quadratic complexity in terms of the sequence length (number of tokens). To reduce complexity, efficient…Jun 5, 20233Jun 5, 20233
Ahmed TahaHigh Resolution Images and Efficient TransformersResNet and ViT models achieve competitive performance, but they are not the best. For instance, DenseNets achieve superior performance to…May 9, 2023May 9, 2023
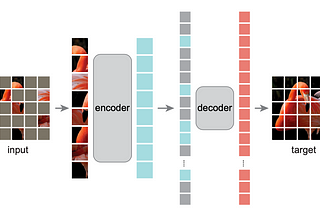
Ahmed TahaMasked Autoencoders Are Scalable Vision LearnersAnnotated data is a vital pillar of deep learning. Yet, annotated data is rare in certain applications (e.g., medical and robotics). To…Mar 27, 2023Mar 27, 2023
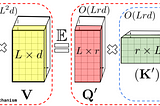
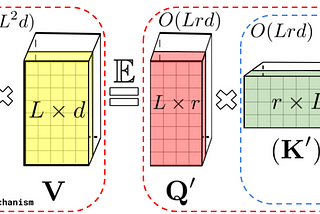
Ahmed TahaRethinking Attention with Performers — Part II & FinalThis article’s objective is to summarize the Performers [1] paper. The article highlights key details and documents some personal comments…Feb 14, 2023Feb 14, 2023
Ahmed TahaRethinking Attention with Performers — Part IThis article’s objective is to present a high-level hand-wavy understanding of how Performers [1] work.Oct 11, 20221Oct 11, 20221
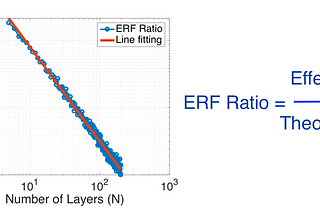
Ahmed TahaUnderstanding the Effective Receptive Field in Deep Convolutional Neural NetworksIn deep networks, a receptive field — or field of view — is the region in the input space that affects a particular layer’s feature as…May 16, 2022May 16, 2022
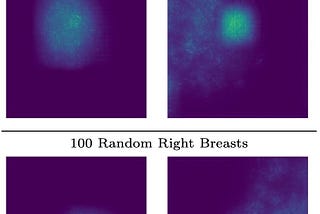
Ahmed TahaUnderstanding Transfer Learning for Medical ImagingTransfer learning (a.k.a. ImageNet pre-training) is a common practice in deep learning where a pre-trained network is fine-tuned on a new…Apr 4, 20221Apr 4, 20221